


Voorwoord:
Dan Marx, de persoon achter de firma AktionRC is een enthousiasteling met de HPI Micro RS4 sinds de auto op de markt verscheen. Al zeer vroeg experimenteerde hij met vele successen diverse motoren in een Micro en besloot op een gegeven moment een 540 motor van een 1:10 auto pas te maken. Dit leek bijna een levensproject te worden want hij stuitte op diverse problemen waarvoor hij van alles probeerde, uiteindelijk bleek zijn grootste probleem de geringe power van de normaal mogelijke accu. Door een ander chassis te maken kon hij 6 accucellen van het formaat 4/5SC pas krijgen en bleek daardoor zijn creatie uiteindelijk te doen wat het moest doen door ongekende snelheden te halen.
Samen met een partner is hij het bedrijf AktionRC gestart om dit chassis met een kleine productieserie op de markt te zetten. Na een totale leegverkoop van dit product heeft het even geduurd voordat er iets nieuws kwam en toen kwam de Sleeper 480 chassis. Dit chassis is totaal anders dan zijn voorloper, het kan de iets kleinere Graupner Speed-480bb herbergen gevoed door 9 cellen van het type 2/3A welke ondertussen aardig doorontwikkelt zijn om grote vermogens aan te kunnen. Met de snelste 480bb-race motor claimde hij met gemak 51mph te kunnen halen wat zo´n dikke 80km/u is.
Ik zelf had al ervaring met deze motor in mijn eigen gebouwde chassis voor een speedrun in 2004 maar dan met 12 cellen, mijn hoogste snelheid lag op 96km/u. Vanwege het publiceren van mijn ideeën voor de volgende speedrun op het forum van Yourmicro bood Dan mij een Sleeper aan welke ik voor een speciale prijs kon kopen. Het scheelde mij een hoop werk om er zelf een nieuw chassis te maken en de prijs was ook zeer interessant dus heb ik 1 van zijn 200 geproduceerde chassis besteld.
Aanvang:
Bij aanschaf van dit chassis is nog steeds een standaard Micro RS4 nodig om de aandrijving en ophanging te gebruiken dus denk niet dat je met dit product een complete auto hebt. De benodigde onderdelen zijn ook los verkrijgbaar maar de totale kosten van wat je nog nodig hebt ligt in losse onderdelen veel hoger dan een complete kit welke momenteel voor 69 euro verkocht wordt. Wel kan je dan gaan overwegen om allemaal optionele aluminium parts te kopen, een oneway frontdiff, een achter balldiff en een setje aluminium of stalen aandrijfasjes voor is wel minimaal aan te bevelen. Het pakketje wordt verstuurd in een bubbeltjes enveloppe en bevat naast de nodige onderdelen ook extra´s. Zo zijn er 3 verschillende verwisselbare achterdelen waarmee je de stijfheid van de suspension kunt bepalen (achter veert de MRS4 op het chassis) in zowel 140 als 150 mm want de wielbasis van de MRS4 is te verzetten maar is 150mm voor hogere snelheden aan te bevelen. Ook is er een motorplaat mee geleverd voor de 480 motor, op verzoek kan je een plaat voor een 300, 400 of 540 erbij bestellen. Om het geheel af te maken zijn zelfs schroeven voor de motor en motorplaat en diverse andere montagematerialen mee geleverd. Tevens krijg je een login account bij zijn website om de overzichtelijke manuals te downloaden.
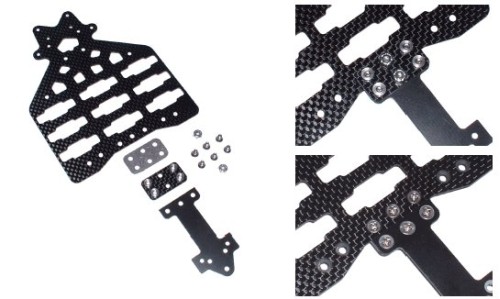
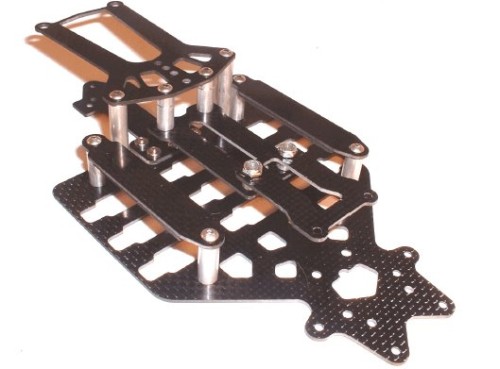
Het geheel zit vrij snel in elkaar, de schroefjes vielen heel mooi in de verzonken gaten van de delen en als je al een reeds gebouwde Micro hebt staan is binnen 5 minuten de nodige onderdelen overgezet. Er is 1 nadeel, de schroeven zijn volgens Amerikaanse maten en passen Europese inbussleutels niet maar gelukkig is daar ook aan gedacht door het juiste gereedschap mee te leveren.
Vanwege mijn speedrun project begonnen tijdens de bouw al snel de aanpassingen zoals het pas maken van 11 cellen en daarbij een eigen bovendeck om de cellen op hun plek te houden.
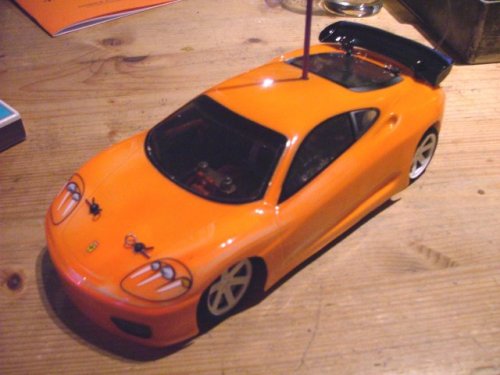
Eenmaal in elkaar blijkt dat niet alle standaard HPI body’s passen, de Proline Ferrari is precies zo breed als het chassis en moet je dus op zoek gaan naar een brede body welke Proline (Xray) wel in het assortiment kent.
Om de lange 480 motor nog net tussen de wielen te herbergen zijn er wat afstandsbusjes mee geleverd. Om de wielen nog verder uit elkaar te krijgen moet je 1 wieladapter nog op maat knippen. Ik zelf heb een bredere starre achteras gemaakt, bij de geplande hoge snelheden kan je beter de differentieel strak hebben voor een maximale stabiliteit en totaal geen differentieel betekent nog minder mogelijke slijtageproblemen. Door de bredere as hoefde ik niets met de wieladapters te doen.
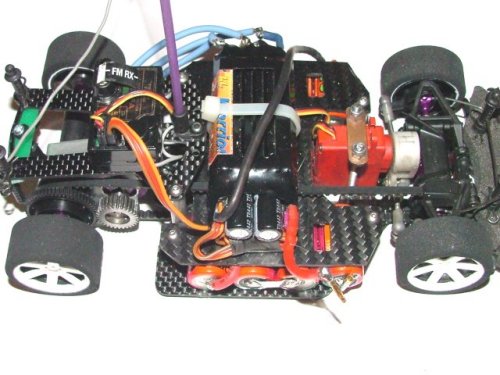
Eenmaal in elkaar is het wel te merken dat een accu wisselen niet eenvoudig is en kan je beter 1 vaste accu gebruiken. Omdat deze accu´s hier binnen Nederland niet op maat verkrijgbaar zijn moet je die zelf in elkaar solderen maar dat mag geen problemen geven. De beste keus op dit moment (zeker voor dit soort vermogens) zijn de GP1100 cellen welke verkrijgbaar zijn voor ongeveer 3 euro per stuk. Ik heb voor mijn project 11 cellen gehaald welke gepushed en gematched zijn welke ruim 5 euro per stuk kosten.



Het monteren van de electronica gaat vrij gemakkelijk. Er past nog een standaard formaat servo in maar wie met zo´n project aan de gang gaat doet er verstandig aan om een micro servo te gebruiken in combinatie met de optionele montagemateriaal en dual steering link van HPI. De regelaar en ontvanger moet je op het bovendeck of op 1 van de batterijbeugels plakken met een beetje dubbelzijdig tape. Als regelaar voor de 480 motor worden de betere mini regelaars voor 540 motoren aanbevolen zoals de GM SX3(R), GM V3(R) of de LRP Quantum series, ik zelf heb goede ervaringen met de Schulze Slim-40CWe regelaar, goed betaalbaar, erg plat en past prima op het bovendeck. Het mag duidelijk zijn dat een wat kleinere ontvanger ook een aanbeveling is, zeker als je met een lage body zoals de Porsche 962 wilt rijden. Als de auto rijklaar is valt het een beetje op dat veel gewicht van de accu´s meer aan de voorkant ligt wat blijkbaar niet nadelig is voor de auto.
Rij impressie:
De eerste keer dat ik er mee op de oval reed viel het mij op dat de auto op hoge snelheden nog redelijk stabiel en controleerbaar was, alleen bij extreme hoge snelheden (boven de 100km/u) kwam de auto los van de grond. Aërodynamica gaat dan ineens een grote rol spelen maar bij de normaal bedoelde setup is hooguit een 90 km/u haalbaar en heeft de auto totaal geen last van dit fenomeen.
Uiteindelijk met een Lehner 1020/12 brushless motor (300 watt, 5000rpm/v) en wat aangepaste aërodynamica wist ik bij de club AMCC-NH in Alkmaar op de ovale wielerbaan een laptime van 9.01 seconde neer te zetten wat overeen kwam met 99.89 km/u gemiddeld op die ronde, dit geeft denk ik wel aan dat de auto zich prima laat gedragen bij extreem hoge snelheden.
Conclusie:
Met dit chassis kan je niet fout gaan wil je hoge snelheden met een Micro RS4 halen maar er is 1 probleem, de productie is stopgezet. Daartegen is op basis van dit chassis wel weer een 3-tal nieuwe producten neergezet onder de noemer X3. Drie versies voor de inbouw van een 540 motor aan de hand naar het type accu:
– 6 cell 4/5SC
– 4 cell SubC
– LiPo
Deze X3 bevat dezelfde verwisselbare achter-chassisdeel en als je de Lipo versie koopt krijg je een dichte bodemplaat die vrij makkelijk te bewerken is om hem om te toveren naar een Sleeper voor het gebruik van 9 cellen 2/3A of iets anders. Alleen mis je de achter bovendeck welke eventueel nog wel zelf te maken is maar niet nodig is, de X3 heeft achter een andere opzet voor de bodymontage gekregen.
9 cellen is ook niet nodig, ook voor de wintercupracers die vaak aan maximaal 6 cellen verbonden zijn kan je dus ook een 6 cellen pakket maken waardoor er op het vlakke chassis nog ruimte over is voor electronica.
Al met al een goed betaalbaar chassis van hoge kwaliteit en een goed prestatieniveau voor leuke snelheids experimentjes.
Natuurlijk ook even de nadelen:
– vlakke ondergrond nodig voor een nog goed controleerbaar rijgedrag
– Het is een snaar aangedreven auto, veel vuil en steentjes kunnen zich in de poelies ophopen
– Wees voorzichtig met de rem, vol rem kan je een spur kosten
Geschreven door Roelof Tooms voor RC-Junkies.com (c) 2005
